知识点
同步的概念
同步是一种按照一定规则执行任务,是进程之间的先后次序关系。
注意,不能把同步错误理解为同时。
同步与互斥的区别
针对同一个信号量 S。
同步:先 V 后 P,而且 V 操作和 P 操作一般分属两个进程,进程 A 执行 V(S),进程 B 才能执行 P(S),同步信号量初始值一般为 0。
互斥:先 P 后 V,而且 P 操作和 V 操作必须属于同一个进程,进程 A 执行 P(S),此时对临界区上锁,相当于操作系统中的关中断,然后进行临界区操作,然后进程 A 执行 V(S),此时对临界区解锁,相当于操作系统中的开中断。互斥信号量初始值必须为 1。
同步过程分析
AOV 网每一个顶点代表一个任务,每一条有向边代表一个同步关系,对于任意一条边
为了方便,可以先对 AOV 网进行拓扑排序,按照拓扑排序序列顺序依次对每个任务进行分析。
历年真题
2020 年第 45 题
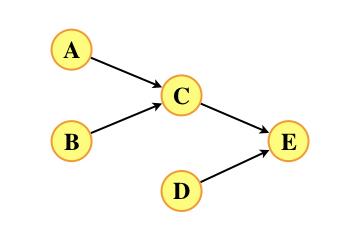
现有 5 个操作 A、B、C、D 和 E ,操作 C 必须在 A 和 B 完成后执行,操作 E 必须在 C 和 D 完成后执行。请使用信号量的 wait(),signal() 操作(P、V 操作)描述上述操作之间的同步关系,并说明所用信号量和初值。
解答:
列出前置关系:
任务前置任务无无无
可以画出 AOV 网:
进行拓扑排序:
方法一:每个任务一个信号量
即每个 AOV 网中每个顶点构造一个信号量,默认初始为 0。
每个操作需要消耗前置操作信号量,生成当前操作信号量。
semaphore A = 0; // 可用的A操作数量
semaphore B = 0; // 可用的B操作数量
semaphore C = 0; // 可用的C操作数量
semaphore D = 0; // 可用的D操作数量
semaphore E = 0; // 可用的E操作数量
cobegin
Process A() {
完成操作A;
signal(A); // V(A);
}
Process B() {
完成操作B;
signal(B); // V(B);
}
Process C() {
wait(A); // P(A);
wait(B); // P(B);
完成操作C;
signal(C); // V(C);
}
Process D() {
完成操作D;
signal(D); // V(D);
}
Process E() {
wait(C); // P(C);
wait(D); // P(D);
完成操作E;
signal(E); // V(E);
}
coend严格来说这种写法在某些场景会出问题,比如一个任务是多个任务的前驱的情况,因为没有明确资源的同步关系,使用接下来的每个同步关系一个信号量更加严谨。
方法二:每个同步关系一个信号量
即每个 AOV 网中每条有向边(表示一个同步关系)构造一个信号量,默认初始为 0。
semaphore S_AC = 0; //控制操作A和C的执行顺序
semaphore S_BC = 0; //控制操作B和C的执行顺序
semaphore S_CE = 0; //控制操作C和E的执行顺序
semaphore S_DE = 0; //控制操作D和E的执行顺序
cobegin
Process A() {
完成操作A;
signal(S_AC); // V(S_AC);
}
Process B() {
完成操作B;
signal(S_BC); // V(S_BC);
}
Process C() {
wait(S_AC); // P(S_AC);
wait(S_BC); // P(S_BC);
完成操作C;
signal(S_CE); // V(S_CE);
}
Process D() {
完成操作D;
signal(S_DE); // V(S_DE);
}
Process E() {
wait(S_CE); // P(S_CE);
wait(S_DE); // P(S_DE);
完成操作E;
}
coend2022 年第 46 题
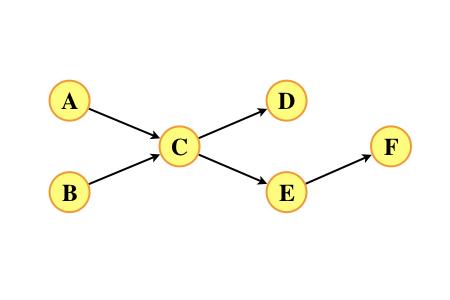
某进程的两个线程 T1 和 T2 并发执行 A、B、C、D、E 和 F 共 6 个操作,其中 T1 执行 A、E 和 F ,T2 执行 B、C 和 D。题 46 图表示上述 6 个操作的执行顺序所必须满足的约束:C 在 A 和 B 完成后执行, D 和 E 在 C 完成后执行,F 在 E 完成后执行,请使用信号量 wait()、signal() 操作描述 T1 和 T2 之间的同步关系,并说明所用信号量的作用及其初值。
解答:
题目已经给出了 AOV 网。
列出前置关系:
进行拓扑排序:
因为比如 C 是 D 和 E 的前驱的情况,因为没有明确资源的同步关系,所以使用每个任务一个信号量的方法会出问题,这里必须使用每个同步关系一个信号量的方法。
每个同步关系一个信号量
即每个 AOV 网中每条边(表示一个同步关系)构造一个信号量,默认初始为 0。
semaphore S_AC = 0; //控制操作A和C的执行顺序
semaphore S_BC = 0; //控制操作B和C的执行顺序
semaphore S_CD = 0; //控制操作C和D的执行顺序
semaphore S_CE = 0; //控制操作C和E的执行顺序
semaphore S_EF = 0; //控制操作E和F的执行顺序
cobegin
Process T1() {
// process A
完成操作A;
signal(S_AC); // V(S_AC);
// process E
wait(S_CE); // P(S_CE);
完成操作E;
signal(S_EF); // V(S_EF);
// process F
wait(S_EF); // P(S_EF);
完成操作F;
}
Process T2() {
// process B
完成操作B;
signal(S_BC); // V(S_BC);
// process C
wait(S_AC); // P(S_AC);
wait(S_BC); // P(S_BC);
完成操作C;
signal(S_CD); // V(S_CD);
signal(S_CE); // V(S_CE);
// process D
wait(S_CD); // P(S_CD);
完成操作D;
}
coend上述同步关系可以进行简化,同一个线程中的同步关系可以不用设置信号量,跨线程执行的只有 C 的前置 A 和 E 的前置 C。只需要删除不跨线程的信号量即可,简化后如下:
semaphore S_AC = 0; //控制操作A和C的执行顺序
semaphore S_CE = 0; //控制操作C和E的执行顺序
cobegin
Process T1() {
// process A
完成操作A;
signal(S_AC); // V(S_AC);
// process E
wait(S_CE); // P(S_CE);
完成操作E;
// process F
完成操作F;
}
Process T2() {
// process B
完成操作B;
// process C
wait(S_AC); // P(S_AC);
完成操作C;
signal(S_CE); // V(S_CE);
// process D
完成操作D;
}
coend当然,考场上时间紧迫,没有优化到最简也是没有关系的。